For my Physics Simulations class, we had to implement a system where we applied Numerical Integrators in a 3D world. One of the extra points was having 100+ bodies in the simulation, and having learned previously in class about constraints, my first thought was to make a cloth simulation so I could apply what was learned and have a better understanding of spring systems.
The project required the use of a personal framework that had no collaboration from other students, which prompted me to create my GhostEngine Framework.
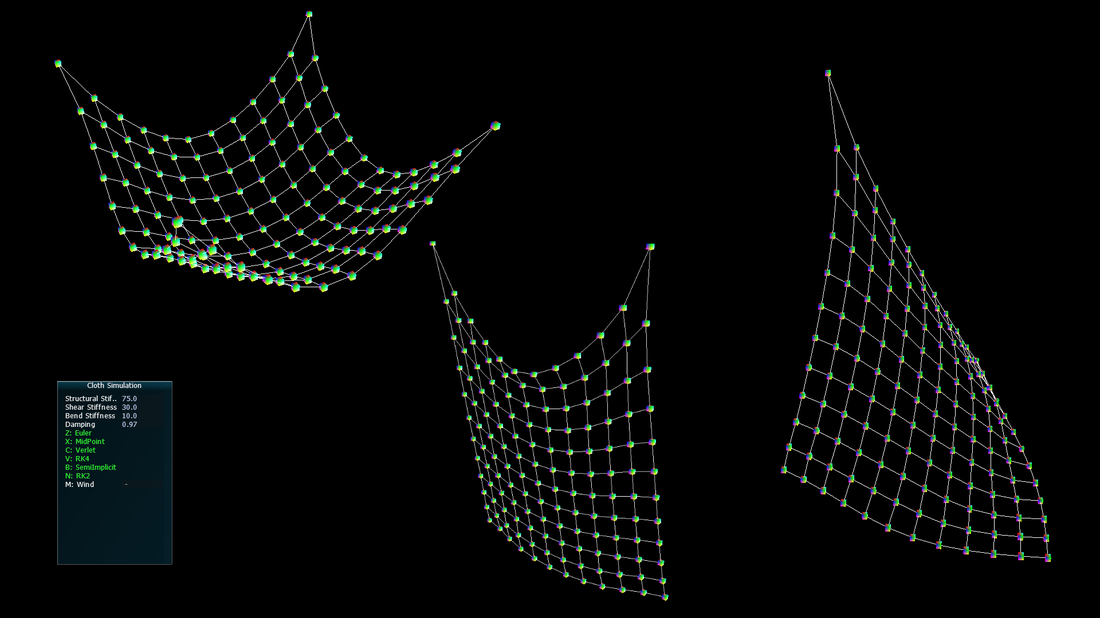
The system consisted of 144 bodies, which I called PointMass since they represented a point with mass, and 3 types of springs: Structural, Shear, and Bend.
The Numerical Integrators implemented were
The project required the use of a personal framework that had no collaboration from other students, which prompted me to create my GhostEngine Framework.
The system consisted of 144 bodies, which I called PointMass since they represented a point with mass, and 3 types of springs: Structural, Shear, and Bend.
The Numerical Integrators implemented were
- Explicit Euler
- Semi-Implicit Euler
- Verlet
- Midpoint
- RK2
- RK4